Soft Robotic Actuators
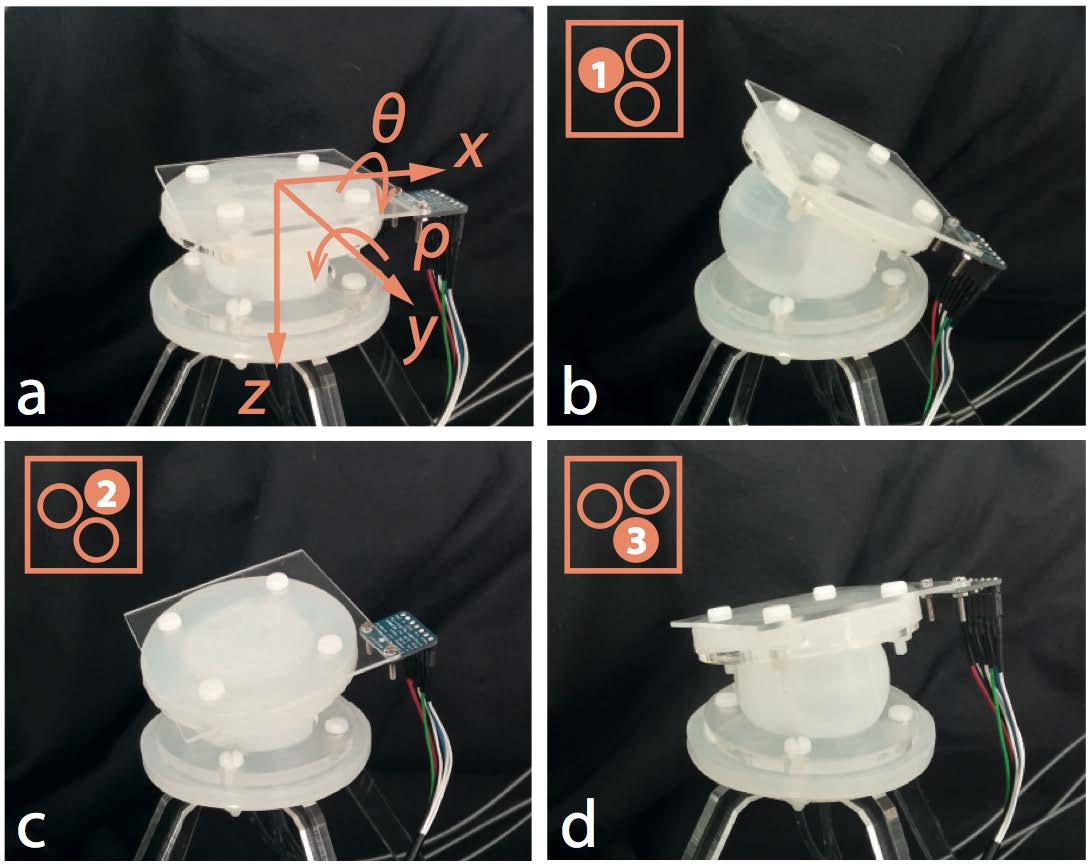
Robotic actuator. (Photo: ETH Zurich)
The individual modules of the facade are actuated by novel soft robotic pneumatic actuators with three chambers. The principle of actuation is based on the inflation of one chamber due to pressurised air. The non-inflated chambers create a non-symmetrical deflection which causes the top plane of the actuator to rotate. The relationship between pressure and angle is non-linear and hysteretic and is currently investigated.
For further inforation please visit the homepage of the Chair of Architecture and Building Systems.